[Paper Review] RTMDet: An Empirical Study of Designing Real-Time Object Detectors
A review of RTMDet (arXiv 2022): a real-time detector that reaches 52.8% COCO AP at 300+ FPS through systematic design choices rather than a new module, and extends cleanly to instance segmentation and rotated detection.
Note: This is a review of “RTMDet: An Empirical Study of Designing Real-Time Object Detectors” (Lyu et al., 2022; arXiv:2212.07784, doi:10.48550/arXiv.2212.07784). Official code and models: OpenMMLab MMDetection.
Unlike my other paper reviews, this one is an original write-up rather than a translation — it accompanies a hands-on project in which I fine-tuned RTMDet-m for construction-site safety-gear detection.
Why I Read This Paper
I used RTMDet-m as the detector in a small safety-gear project (helmet / harness violations on a construction-site dataset), so I wanted to understand the model I was fine-tuning rather than treating it as a black box from a config file. Two things drew me in.
First, the title says “an empirical study,” not “a novel architecture.” RTMDet does not introduce one headline module. It reaches what was, at publication, state-of-the-art real-time accuracy by making a series of careful, measured design choices — backbone/neck capacity balance, a large-kernel block, a soft-label matcher, a two-stage augmentation schedule — and ablating each one. That honest, engineering-first framing is rare and worth studying.
Second, it is the detector behind a large slice of OpenMMLab’s mmdetection, so reading it pays off directly in practice. The same backbone and assignment recipe is reused for detection, instance segmentation, and rotated detection — a good test of whether the design is general or overfit to COCO boxes.
Introduction
Real-time object detection has been dominated by the YOLO family (YOLOX, YOLOv5/6/7, PPYOLOE), which iterates aggressively on the same recipe. RTMDet asks a cleaner question: if you systematically study each component — the basic block, the capacity split between backbone and neck, the detection head, the label assignment, and the training pipeline — how far can a real-time detector go without inventing a new module?
The paper’s stated answer (from the abstract): RTMDet reaches 52.8% AP on COCO at 300+ FPS on an NVIDIA 3090, offers the best parameter-accuracy trade-off across tiny→extra-large sizes, and, at publication, set new state-of-the-art results for real-time instance segmentation and rotated detection. Its contributions are, in effect:
- An efficient macro architecture with compatible capacities in the backbone and neck.
- A basic building block based on large-kernel depth-wise convolutions (CSPNeXt).
- Soft labels in the dynamic label-assignment cost, improving the matcher.
- Better training techniques (cached Mosaic/MixUp + a two-stage schedule).
- A single recipe that extends to instance segmentation and rotated detection.
Context / Related Work
Where does this sit relative to prior real-time detectors?
- vs. the YOLO series. YOLOX introduced an anchor-free, decoupled-head design with SimOTA assignment; YOLOv6/v7/PPYOLOE pushed re-parameterization, training tricks, and scaling. RTMDet stays anchor-free and SimOTA-style but treats the whole pipeline as an ablation study, and it argues for balancing backbone and neck capacity instead of piling parameters into the backbone.
- vs. large-kernel CNNs. ConvNeXt and RepLKNet showed large kernels can rival transformers. RTMDet brings a moderate 5×5 depth-wise kernel into a CSP-style block (CSPNeXt) rather than the very large kernels of RepLKNet, trading a little receptive field for latency.
- vs. dynamic label assignment. OTA / SimOTA frame assignment as optimal transport with hard matching costs. RTMDet’s contribution is to soften the labels inside that cost, which is a small change with a measurable gain.
The framing — “an empirical study” inside the mmdetection ecosystem, reusing one design across three tasks — is the paper’s real position: not a single trick, but a reproducible recipe.
Method
1. Macro design: balance backbone and neck capacity
The central architectural claim is that a detector wastes capacity if the backbone is heavy and the neck is thin. RTMDet shifts parameters and compute toward the neck so the two stages have compatible capacities, using the same basic block in both.
flowchart LR
I["Image 640x640"] --> BB["CSPNeXt backbone<br/>5x5 depthwise blocks + channel attention"]
BB --> NK["CSPNeXtPAFPN neck<br/>same blocks, balanced capacity"]
NK --> HD["RTMDetSepBNHead<br/>shared conv weights, separate BN<br/>anchor-free, strides 8/16/32"]
HD --> CLS["classification"]
HD --> REG["box regression"]
2. The basic block: large-kernel depth-wise convolution (CSPNeXt)
Each block uses a 5×5 depth-wise convolution to widen the effective receptive field cheaply, wrapped in a CSP (cross-stage partial) structure with a channel-attention (SE-style) module and SiLU activations. The paper picks 5×5 as the accuracy/latency sweet spot — not the single most accurate kernel (7×7 edges it out) but the best speed-for-accuracy balance.
3. Head: shared weights, separate BN
The detection head (RTMDetSepBNHead) shares its convolution weights across the three feature scales but keeps separate Batch Normalization per scale. Sharing weights cuts parameters; per-scale BN preserves the different feature statistics at strides 8/16/32. The head is anchor-free (point-based, with a distance-to-box coder).
4. Dynamic soft-label assignment
Assignment decides which predictions are matched to which ground-truth box during training. RTMDet keeps SimOTA’s dynamic cost but injects soft labels: instead of a hard target of 1, the classification target is the prediction–GT IoU, so well-localized predictions get a stronger learning signal. The matching cost is a weighted sum of classification, regression, and center-prior terms:
\[C = \lambda_1 C_{cls} + \lambda_2 C_{reg} + \lambda_3 C_{center}\]with the regression cost $C_{reg} = -\log(\text{IoU})$ and a soft classification cost of the form
\[C_{cls} = \text{CE}(P,\, Y_{\text{soft}}) \cdot (Y_{\text{soft}} - P)^2, \qquad Y_{\text{soft}} = \text{IoU}(\text{pred}, \text{gt}).\]On training losses, the paper’s assignment ablation uses Focal Loss + GIoU, while the released MMDetection RTMDet configs use Quality Focal Loss + GIoU — the soft IoU labels above are the GFL/QFL idea applied inside the matcher.
5. Training: cached augmentation + a two-stage schedule
Training runs for 300 epochs in two stages:
- First ~280 epochs — strong augmentation with Cached Mosaic and Cached MixUp (the cache makes the heavy mixing cheap).
- Last ~20 epochs — strong mixing is switched off and replaced with Large-Scale Jittering (LSJ), letting the model settle on cleaner, more realistic images.
This staged schedule is one of the larger contributors to final accuracy, especially for the bigger models.
Experiments / Results
COCO object detection
The headline benchmark is the parameter-accuracy-latency trade-off across the five model sizes:
| Variant | Params (M) | FLOPs (G) | Latency (ms) | COCO box AP (%) |
|---|---|---|---|---|
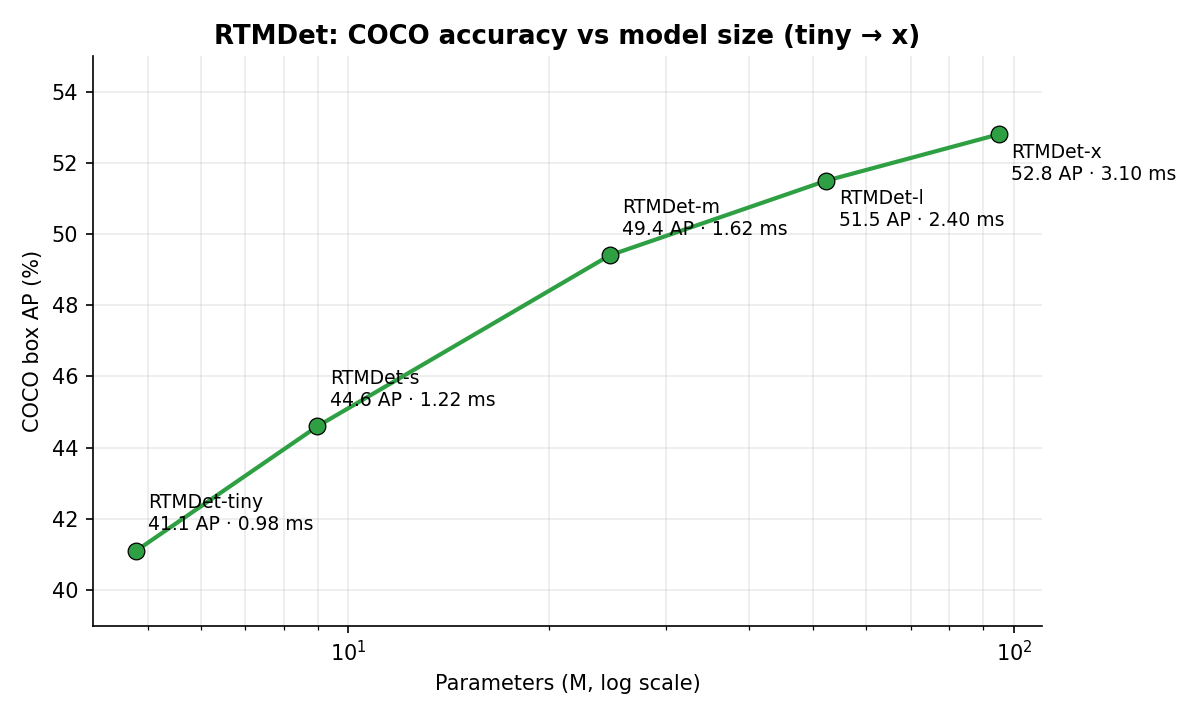
| RTMDet-tiny | 4.8 | 8.1 | 0.98 | 41.1 |
| RTMDet-s | 8.99 | 14.8 | 1.22 | 44.6 |
| RTMDet-m | 24.7 | 39.3 | 1.62 | 49.4 |
| RTMDet-l | 52.3 | 80.2 | 2.40 | 51.5 |
| RTMDet-x | 94.9 | 141.7 | 3.10 | 52.8 |
Table 1: RTMDet COCO results (numbers from the paper’s Table 2; latency on an NVIDIA 3090 with TensorRT-FP16, batch size 1). The released MMDetection model zoo mostly matches, with small repo/paper discrepancies — e.g. RTMDet-l latency 2.44 ms (zoo) vs 2.40 (paper), and RTMDet-s params 8.89M (zoo) vs 8.99M (paper). The main claim, RTMDet-x at 52.8% AP and 3.10 ms (~300+ FPS), is the bold row.
The accuracy-vs-size curve from the table above. Each step up the ladder buys diminishing AP for steadily more parameters and latency — yet even RTMDet-tiny clears 41% AP at 0.98 ms.
The 3.10 ms latency for RTMDet-x is where the “300+ FPS” claim comes from ($1000 \,/\, 3.10 \approx 322$ FPS). Even RTMDet-tiny, at 4.8M params, clears 41% AP at sub-millisecond latency.
Key ablations
The paper’s ablations are what justify the “empirical study” title. The most informative (numbers as reported in the paper’s ablation tables):
- Large kernel. Moving the block to a 5×5 depth-wise conv raises AP to 50.9% vs 50.0% for 3×3. (7×7 reaches 51.1%, but 5×5 was chosen as the speed/accuracy trade-off.)
- Soft-label assignment. The full dynamic soft-label assignment beats plain SimOTA by about +1.3 AP on RTMDet-s; the soft classification cost in isolation accounts for ~+0.4 of that in the component ablation.
- Training pipeline. The cached-augmentation + two-stage schedule gives a clear lift, larger on the big models than the small ones — about +1.5 AP on RTMDet-l (≈49.8 → 51.3 in the paper’s two-stage ablation).
Beyond boxes: instance segmentation and rotated detection
The same recipe transfers:
- Instance segmentation (RTMDet-Ins). RTMDet-Ins-x reaches 52.4% box AP / 44.6% mask AP at real-time speed (~180 FPS) — state-of-the-art for real-time instance segmentation at publication.
- Rotated detection (RTMDet-R). RTMDet-R-l reaches 81.33% mAP on DOTA-v1.0 with multi-scale testing plus COCO pre-training (80.54% multi-scale from ImageNet; 78.85% single-scale), state-of-the-art among real-time rotated detectors at publication.
That a single backbone + assignment design tops three task leaderboards is the strongest evidence that the choices are general, not COCO-specific.
Conclusion & Insight
RTMDet is a refreshing kind of paper: it advanced the state of the art (at publication) not by proposing one clever module but by measuring a coherent set of design decisions and keeping the ones that pay. The result is a clean, reproducible family of real-time detectors that generalizes across detection, segmentation, and rotated boxes.
Strengths
- Empirical rigor. Every claim (large kernel, capacity balance, soft labels, two-stage augmentation) is backed by an ablation rather than intuition.
- Practical trade-off. Five sizes covering 4.8M→94.9M params and sub-1 ms→3.1 ms latency mean there is a usable model for almost any deployment budget.
- Generality. One recipe → three tasks, all competitive, which is hard to fake.
- Reproducibility. Code, configs, and weights ship in
mmdetection; the released model-zoo numbers reproduce the paper’s (give or take a rounding-level latency difference).
Limitations
- Incremental by design. The components (CSP blocks, SimOTA-style assignment, Mosaic/MixUp) are individually known; the contribution is the combination and the measurement, not a new primitive.
- Latency is hardware- and runtime-specific. The “300+ FPS” figure assumes a 3090 with TensorRT-FP16 at batch 1; on other GPUs, with FP32, or larger inputs, the picture shifts.
- Benchmark-centric evaluation. Results are COCO / DOTA mAP. The paper does not study failure modes that matter in deployment — class imbalance, domain shift, or false positives on out-of-distribution inputs.
Open Questions / Future Work
The limitation I felt most directly is the last one. In my own project, an RTMDet-m fine-tune scored ~0.91 mAP on the in-domain validation set yet confidently fired helmet_off on workers who were wearing helmets — a failure the COCO-style metric never measures, and one that came from the data distribution, not the architecture. RTMDet’s contribution is a strong, fast backbone; what it (reasonably) leaves open is how that backbone behaves once the training distribution is biased. A natural follow-up to an “empirical study of architecture” is an equally empirical study of data and evaluation for the same detector — which is exactly where the hands-on side of this project went.
Where RTMDet sits in 2025
This reviews a 2022 paper, so it deserves a dated marker. RTMDet (52.8 COCO box AP at its largest) is no longer the top real-time number, and the field has made two structural moves it predates:
| detector | COCO AP (largest) | head |
|---|---|---|
| RTMDet-X (2022) | 52.8 | CNN, NMS |
| YOLO11-X (2024) | 54.7 | CNN, NMS |
| RT-DETRv2 (2024 report) | up to 54.3 | DETR, NMS-free |
| YOLOv10 (NeurIPS 2024) | — | CNN, NMS-free (dual assignment) |
| D-FINE-X (ICLR 2025) | 55.8 (59.3 w/ Objects365) | DETR, NMS-free |
Both shifts bear on this project: NMS-free heads (RT-DETR / YOLOv10 / D-FINE) remove the NMS/IoU duplicate-suppression step I tuned around — the confidence threshold itself still remains — and DETR-style decoders replace the dense head + label assignment. None of this makes RTMDet obsolete for a single-consumer-GPU project — it still trains comfortably on 8 GB where DETR-family defaults often assume far more — but a 2026 reader should know the COCO leaderboard moved on. A controlled head-to-head (accuracy and trainability on one GPU) is its own post.
Cross-source caveat: these AP figures are each model’s own paper/repo numbers, measured on different hardware and runtimes — read them as placement, not a controlled comparison. The hardware-specific-latency caveat in Limitations applies doubly across models.
Resources
- Companion post — the hands-on side of this project: when this exact model still produced false positives, and how empty-GT negatives fixed it
- Paper — RTMDet: An Empirical Study of Designing Real-Time Object Detectors, Lyu et al., 2022 (arXiv:2212.07784)
- Code & model zoo — OpenMMLab MMDetection —
configs/rtmdet - Related — YOLOX (anchor-free + SimOTA), ConvNeXt / RepLKNet (large-kernel CNNs), OTA / SimOTA (dynamic label assignment)
- Since RTMDet (2025 placement) — RT-DETR, DETRs Beat YOLOs (arXiv:2304.08069) and RT-DETRv2 (arXiv:2407.17140); YOLOv10, NeurIPS 2024 (repo); D-FINE, ICLR 2025 (repo); Ultralytics YOLO11